Reduction And Intractibility
16 Mar 2017 | algorithms theoryComplexity Classes
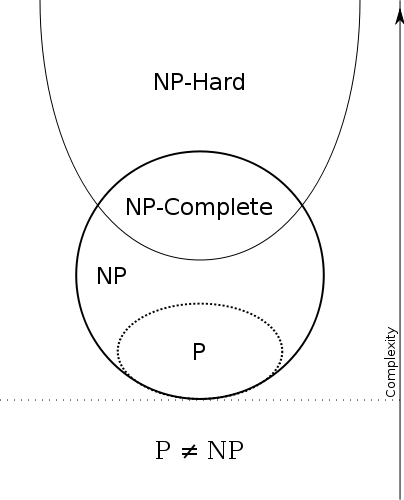
With complexity classes, we aim to determine the “difficulty” of a problem. They allow us to know what is solvable in polynomial time and what isn’t. This is what the \(P = NP\) problem deals with. \(P=NP\) implies that for any polynomial time verification solution, there is a polynomial time solver for the problem. Most computer scientists believe that \(P \neq NP\). Assuming \(P \neq NP\),
P
Loosly, \(P\) is defined as the set of all problems such that there is a polynomial time solution. This means that the solution to a problem \(a \in P\) runs in \(O(n^k)\) time where \(k\) is some constant.
NP
Loosly, \(NP\) is defined as the set of all problems such that there is a polynomial time verification.
NP-Hard
Loosly, \(NP-Hard\) problems are such that any problem in \(NP\) can be reduced to that \(NP-Hard\) problem. Notice that the problen need not be in \(NP\). We have a special class of problems for those, as seen below.
NP-Complete
Loosly, \(NPC\) problems are considered the hardest problems in \(NP\). Basically, any problem in \(NP\) can be reduced to a \(NPC\) problem. This means that any \(NPC\) problem can be reduced to another \(NPC\) problem. As you can see \(NPC \subset NP-Hard\)
Reductions
Reductions allow us to to determine the difficulty of a problem.
We say that for two problems \(Y\) and \(X\), \(Y \leq_p X\) if instances of \(Y\) can be solved by a polynomial amount of computation plus a polynomial number of calls to a “black-box” that solves \(X\).

You can think of reduction as calling a library as part of your solution. For example.
In order for reductions to work, we have to have some set of problems that are known to be \(NPC\). A common starting point is \(SAT\), or boolean satisfiability. Karp has a famous paper containing 21 \(NPC\) problems you can view here. Here are some popular \(NPC\) Problems
3SAT
For \(3SAT\), we are given a boolean formula \(\Phi\) in CNF form (conjunctive normal form) such that for each clause \(C_r\), \(C_r = l_1 \lor l_2 \lor l_3\). We return true if this boolean formula is satisfiable.
Clique
We say that a graph \(G\) has a clique of size \(k\) if there is a set of vertices \(I\) such that \(\left\vert{I}\right\vert = k\) and \(I\) is fully connected.
We will give a reduction from \(CLIQUE\) to \(3SAT\).
We can define our function \(A\) as follows:
For each \(C_r = ( l_1 \lor l_2 \lor l_3)\) for \(r =1,\ldots,k\) , create corresponding vertices \(v_1, v_2, v_3\) in \(V\). Now add an edge between \(v_i^r\) and \(v_j^s\) if \(r \neq s\) and the corresponding literals are consistent( You can’t connect \(\neg l_1\) to \(l_1\)). Now we se that if there is a clique of size \(k\), there is a satisfiable boolean formula for 3SAT.
Vertex Cover
We will prove that \(VERTEX\ COVER \leq_p CLIQUE\).
We say that a graph \(G = (V,E)\) has a vertex cover of size \(k\) if there is a subset of vertices \(S \subset V\) that covers all edges in the graph and \(\left\vert{S}\right\vert = k\).
Given a graph \(G = (V,E)\), we can generate the complement graph \(\bar{G} = (V, \bar{E})\). Now, we solve the problem \(CLIQUE(\bar{G}, \left\vert{V}\right\vert - k)\), and return \(YES\) if we have a solution, and \(NO\) otherwise.
You can see a full proof here